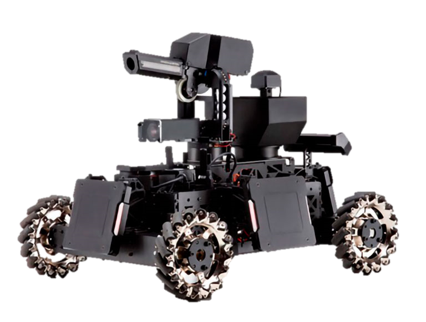
To isolate the algorithm performance in AI Challenge, the competition committee restricted the robot models since ICRA2019 (for more details, please click). Now in Team Ausdroid, two sets of standard robotic platforms are available in Doug Mcdonell Building. Both robots were modified to carry the camera, Lidar and computing device (J120 or Manifold 2). Except regular maintenance, not much fancy work needs to be developed in structure. But there are some important development tasks in embedded programming. Some potential projects in Hardware group beside routine maintenance are listed below. (NOTE: Considering the current COVID-19 situation, the robotic devices are no longer accessible until further notice. The available projects at this stage are marked with *.)