Virtual Competition Arena Testing System (VCATS) is a direct way to test the performance of our autonomous agents. Although the gap between real-life environment and simulation environment is huge, due to lack of resources (robots, funding and space), VCATS is our best option for development and basic testing.
The original platform for simulation that provided by DJI was “Stage”, a ROS simulator with limited functions and similarity with real world. During the development in previous years, the team has developed a “Gazebo” based simulator, which significantly increase the accuracy on the physical model, including gravity, inertia and camera vision. However, the Gazebo simulator consumes extremely high computing power and is not flexible enough to model the competition rules, which means Gazebo simulator can only serve for the navigation testing and single agent testing.
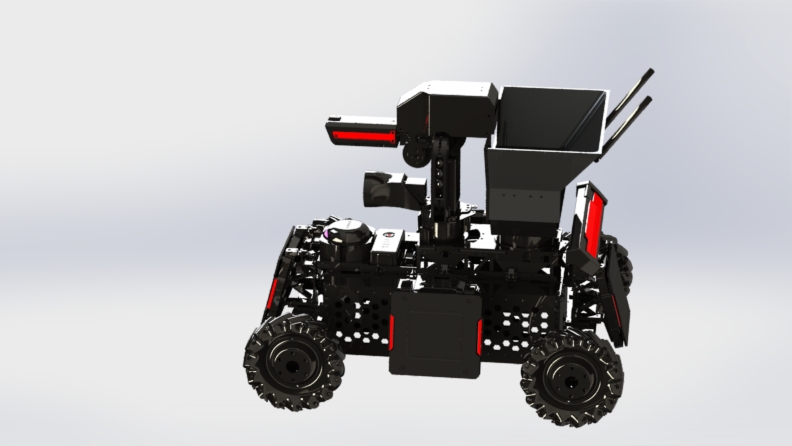
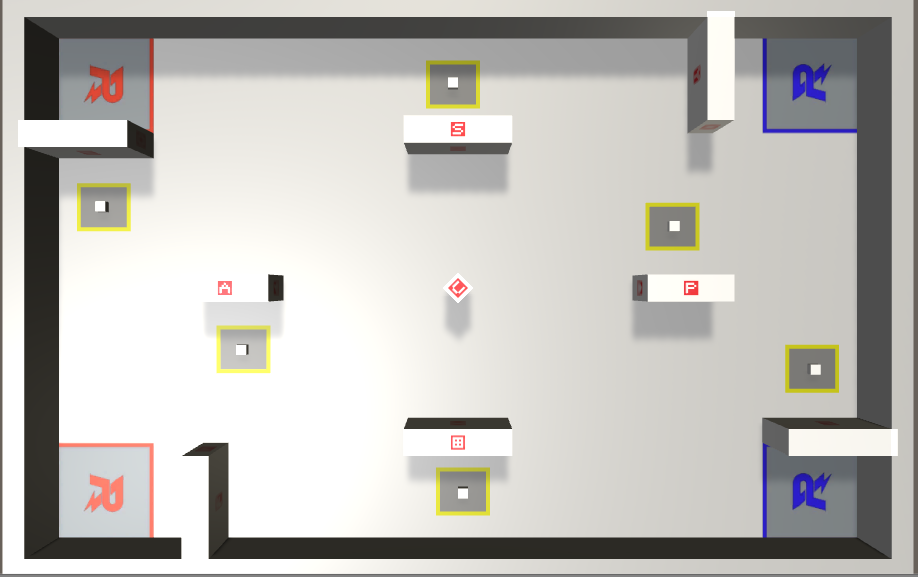
Therefore, in the next phase of the development, team aims to create a simulator that can model the complete competition arena. Unity 3D is chosen as it can provide necessary physical engineering with reasonable computing power, and it also can communicate with ROS through A bridge server. In order to model the complete competition arena, the VCATS should model: the robot (including sensors) and reference system. Furthermore, as a potential development direction, it would be more flexible if VCATS system can be run on a server and communication with other machine through internet connection. So that, we can invite different agents to participant in one match.